Марсоход «Spirit» или «MER-A» (Mars Exploration Rover - A) - первый ровер НАСА из двух запущенных в проекте «Mars Exploration Rover». Миссия стартовала 10 июня 2003 года, а мягкая была совершена 4 января 2004 года, на три недели опередив посадку ровера (MER-B), который был доставлен в другой район планеты. Срок работы ровера значительно превысил изначально планировавшиеся 90 солов (марсианских суток). Это произошло потому, что солнечные элементы марсохода эффективно очищались марсианским ветром, из-за чего марсоход «Спирит» эффективно работал долгое время.
1 мая 2009 года (спустя более чем 5 лет после посадки), марсоход забуксовал в песчаной дюне. Такие происшествия происходили и раньше, и следующие 8 месяцев специалисты NASA тщательно его анализировали: выполняли моделирование участка, программирование, продолжали попытки освободить марсоход. Это продолжалось до 26 января 2010 года, когда было объявлено, что ровер «Spirit» будет использоваться как стационарная платформа.
Последний раз связь с Землей состоялась 22 марта 2010 года, хотя специалисты «JPL» пытались восстановить связь с марсоходом до 24 мая 2011 года. Церемония прощание со «Спиритом», состоявшаяся в штаб-квартире НАСА, транслировалась по NASA TV.
Конструкция и связь с Землей
Электроэнергия, необходимая для работы систем ровера, вырабатывалась панелями фотоэлементов, расположенных на «крыльях» аппарата и состоявших, для повышения надежности, из отдельных ячеек. Они были сконструированы специально для марсоходов «Спирит» и «Оппортьюнити», их конструкция предусматривала достижение максимальной освещенной площади.
Впервые при исследования Марса были использованы солнечные батареи с тройным слоем арсенида галлия. Такие фотоэлементы могут преобразовать большее количество солнечного света, чем их устаревший вариант, установленный на . Солнечные батареи марсохода содержат три слоя фотоэлементов, что позволяло выработать больше электроэнергии для зарядки аккумуляторов. Ровер был укомплектован двумя литий-ионными аккумуляторами с ёмкостью 8 А*ч каждый.
Ровер «Спирит» управлялся блоком под названием «Мозговой центр», защищенным от действия низких температур. В центре марсохода находился так называемый «Тепловой блок электроники», отвечавший за перемещение ровера, а также за управление манипулятором. Управление осуществлялось бортовым компьютером, построенном на 32-битном радиационно-стойком процессоре RAD6000 с частотой 20 МГц. В его распоряжении было 128 мегабайт оперативной памяти и 256 мегабайт постоянной памяти на флэш-накопителе.
«Тепловой блок электроники» был установлен в модуле «Электроника марсохода», находившемся точно в центре аппарата. Тепло от обогревателей удерживалось золотой плёнкой на стенках блоков, ведь ночью температура на Марсе может упасть до - 96 °C. В роли термоизоляциии выступал слой из аэрогеля - уникального материала, обладающего рекордно малой плотностью, высокой твёрдостью, прозрачностью, жаропрочностью, чрезвычайно низкой теплопроводностью и т. д. За то, что плотность аэрогеля всего в 1,5 раза больше плотности воздуха его называют «твёрдым дымом».
Марсоходы миссии «MER» для связи с землей использовали спутник , находящийся на орбите красной планеты. Окно общения с марсоходами составляло 16 минут, после чего спутник уходил за горизонт; марсоход «Спирит» передавал данные орбитальному аппарату в течение 10 минут. Основной объем научных данных передавался на Землю с помощью антенны марсохода, которая использовалась для связи со спутником «Марс Одиссей» в дециметровой части диапазона (UHF). Около 8 % всех данных было передано через марсианский спутник , также применявшийся для ретрансляции сигнала на Землю, до его поломки в ноябре 2006 года. Небольшое количество информации было передано непосредственно с марсохода на Землю с помощью антенны X-диапазона.
Цели исследований
Главной целью проекта было исследование осадочных пород, которые планировалось найти в кратерах Гусева, Эребус и соседних, где предположительно находилось древнее озеро или море. Однако классических осадочных пород найдено не было, в основном были найдены образцы, имеющие вулканическую природу.
Научные цели миссии заключались в поиске и описании разнообразных горных пород и типов почвы, свидетельствующих о присутствии в прошлом воды на поверхности планеты. Планировалось:
- найти образцы с минералами, которые отложились при воздействии осадков, испарении воды, осаждении или гидротермальной деятельности;
- исследовать минералы, горные породы и почву на месте посадки аппарата;
- установить характер и вид геологических процессов, влиявших на формирование рельефа местности. Механизмы этих процессов могут заключаться в водной или ветровой эрозии, отложении осадков, гидротермальных явлениях, вулканизме и образовании кратеров;
- провести калибровку и проверку исследования поверхности, сделанного Марсианским разведывательным спутником (MRO), что поможет в оценке точности и эффективности приборов, использующихся для исследования геологии Марса с орбиты;
- заняться поиском железосодержащих минералов, выявлением и количественной оценкой относительных величин содержания определенных типов минералов, содержащих воду или сформировавшихся в воде, например, железосодержащих карбонатов;
- классифицировать минералы и геологические текстуры, определить процессы их образования;
- выяснить геологические причины, сформировавшие окружающую среду Марса в прошлом, когда на поверхности планеты находилась жидкая вода. Оценить то, насколько такие условия подходили для существования жизни.
Марсоходы Spirit и Opportunity
Национальное аэрокосмическое агентство США NASA в рамках проекта Mars Exploration Rover запустило два марсохода для исследования Марса - Spirit и Opportunity.
Оба марсохода были запущены с помощью ракет-носителей Дельта-2.

Аппарат Spirit (переводится с английского языка как "дух") был запущен первым
10 июня 2003 года
с космодрома на мысе Канаверал (Флорида, США)
. Он попал на Марс
4 января 2004 года.
Второй аппарат — Opportunity (в переводе с английского "благоприятная возможность") — стартовал 7 июля 2003 года и 25 января 2004 года (то есть через три недели после марсохода Spirit) совершил посадку.
Марсоходы опустились на разные стороны Марса, примерно в 9600 километрах друг от друга. Spirit приземлился в районе кратера Гусева, а Opportunity - на плато Мередиан. Это совершенно разная местность, каждая со своими геологическими особенностями. Плато Мередиан считается одним из наиболее ровных и плоских на Марсе. Оно характеризуется постоянным чередованием темной песчаной ряби и светлой скалистой поверхности. По оценкам ученых, они еще никогда не видели подобного марсианского пейзажа.
Opportunity получил фотографии уникального ландшафта плато Мередиан
.


Около двух лет марсоход
Opportunity
изучал марсианский кратер Виктория на плато Мередиан.
С 1506 по 1510 марсианский день, 19-23 апреля 2008, марсоход собирал фотографии для панорамного снимка кратера Виктория, диаметр которого примерно 800 метров.

А в 2008 году покинул его.



В это время марсоход удалился на 300 метров к юго-западу от кратера Виктория. И начал длинное путешествие к кратеру Эндеавур, который превосходит по размеру кратер Виктория в 20 раз! По прямой расстояние до него - 12 километров, но путь этот очень не близкий и трудный.
Этот панорамный снимок получен с
того места, где
марсоход зимовал в ноябре и декабре 2008 года, в километре от южной границы кратера Виктория.

Во время одной из остановок по пути следования к кратеру
Эндеавур марсоход сделал очередной панорамный снимок местности.

Марсоходы Spirit и Opportunity выглядят примерно одинаково и имеют одинаковое устройство. Масса каждого составляет 185 килограммов. Оба марсохода оснащены 6 колёсами.
Источником электроэнергии в них служат солнечные батареи. В распоряжении каждого марсохода — бур, несколько камер, микроскоп и два спектрометра.
Поворотный механизм выполнен на основе сервоприводов. Такие приводы расположены на каждом из передних и задних колёс, средняя пара их не имеет.
Поворот передних и задних колёс марсоходов осуществляется при помощи электромоторов, действующих независимо от моторов, обеспечивающих перемещение аппаратов.
Когда марсоходу необходимо повернуть, двигатели включаются и поворачиваются на нужный угол. Всё остальное время колеса, наоборот, препятствуют повороту, чтобы аппарат не сбивался с курса из-за случайного движения колёс.
Переключение режимов поворот-тормоз производится с помощью реле.
Марсоходы способны копать грунт, вращая одно из передних колес, сами при этом оставаясь неподвижным.
На борту имеются бортовой компьютер и флэш-память.
Марсоходы могут работать при температуре
—
от минус 40 до плюс 40 °C.
Для работы при низких температурах используется радиоизотопный нагреватель, который может дополняться также электрическими нагревателями, когда это необходимо.
Для теплоизоляции применяется аэрогель и золотая фольга.
Марсоходы начали передавать изображения уже через четыре часа после своего приземления. Специалисты отмечают исключительное качество фотографий, их высокое пространственное и цветовое разрешение.
Кроме получения фотографий, марсоходы также предназначены для забора образцов грунта с поверхности Марса. Марсоходу Spirit удалось взять образец камня "Горшок с золотом", в котором был обнаружен гематит. Это очень важная находка, потому что на Земле гематит образуется только во влажной среде. Это подтвердило предположения ученых о том, что когда-то на Марсе было много воды.

Марсоход получил снимки поверхности Марса в кратере Гусева.

В южном полушарии, в кратере Гусева, есть невысокого плато, которое неофициально было названо "Home Plate" (в диаметре достигает 80 метров).
На северной части этого плато три раза зимовал марсоход Spirit
.
Зимой солнце находится довольно низко над горизонтом и поэтому не дает
достаточного количества энергии для зарядки солнечных батарей марсохода.
Несколько панорамных снимков из 246 кадров
показывают ландшафт, окружающий место на плато
"Home Plate"
, где марсоход Spirit провел свою третью марсианскую зиму.


Первые кадры были сделаны на 1477 марсианский день (28 февраля 2008), последние - на 1691 день (5 октября 2008). Во время зимнего периода количество света столь ограничено, что марсоходу не хватало энергии не то что передвигаться, но даже для частых съемок местности.
На 1782 марсианский день, 6 января 2009 года, Spirit спустился с северного склона плато "Home Plate" после 12-и месяцев зимовки.
На 1802 марсианский день, 26 января 2009 года, Spirit получил серию изображений, собранных в панораму, показывающую местопребывание аппарата. Spirit в это время находился чуть ниже невысокого плато "Home Plate".

Следы в правой части обзора показывают спуск аппарата. Для масштаба - расстояние между параллельными колеями шасси ровера составляет приблизительно один метр.
На 1806 день, 31 января 2009 года, аппарат получил еще один снимок, преодолев всего 30 сантиметров пути.
Колесо в правой части снимка - правое переднее колесо марсохода Spirit. Уже к этому моменту колесо было не полностью исправно. Поэтому аппарат был вынужден ехать задом наперед. Команда управления на Земле планировала пройти более большее расстояние, но Spirit в начале дня резко остановился из-за столкновения этого колеса с частично засыпанным песком.
На 1809 марсианский день, 3 февраля 2009 года, Spirit проехал приблизительно 2,6 метра за день, двигаясь по часовой стрелке вокруг плато "Home Plate". При этом он получил серию изображений, объединенных в 120-градусную панораму.

На 1811 марсианский день, 5 февраля 2009 года, Spirit получил снимок, на котором видна марсианская пыль на солнечных батареях аппарата.

На 1829 марсианский день, 24 февраля 2009, Spirit получила изображение участка пройденного пути.

В течении последнего дня аппарат проехал 6,29 метра в северо-западном направлении, к северному краю "Home Plate". Борозда на поверхности, оставленная правым колесом ровера, указывает на его неработоспособность. В течении всего 1829 дня команда управления пыталась подвести аппарат к северному склону плато, что бы иметь возможность переправить его через вершину плато на южную сторону "Home Plate".
В 2009 году Spirit стал неадекватно реагировать на команды управления, посылаемые с Земли . 23 апреля он увяз в песках. К тому моменту из шести колес одно уже было сломано, а оставшиеся пять начинали пробуксовывать. 28 августа марсоход попал в пыльную бурю и окончательно остановился.
С 15 января по 9 февраля 2010 года группа инженеров смогла сдвинуть марсоход с места с помощью сложных маневров - Spirit продвинулся вперёд на 34 сантиметров! Дальнейшее продвижение аппарата было отложено в связи с недостатком энергии в период марсианской зимы.
Марсоходы Spirit и Opportunity должны были проработать всего 90 дней, однако оба до сих пор находятся в рабочем состоянии. Opportuniti сохраняет способность передвигаться, а Spirit официально признан NASA стационарной рабочей станцией. Получается, что вместо 90 дней они проработали около 6 земных лет (примерно три с лишним марсианских года)!
Марсоходы за время своей работы на Марсе выполнили очень важную задачу - обнаружили геологические доказательства существования в прошлом воды на Марсе.
Изучение пород с признаками наличия в них в прошлом воды показало, что атмосфера Марса была раньше кислотной и соленой. Слишком высокое содержание минералов в воде на Марсе сделало невозможным существование даже самых устойчивых к враждебной среде микробов.
Марс был слишком сильно засолен, чтобы поддерживать формы жизни. К такому выводу пришли эксперты NASA. Специалисты основывают свое мнение на данных, полученных с марсохода Opportunity.
В октябре 2009 года NASA планировали запустить исследовательский аппарат Mars Science Laboratory. Однако в силу возникших технических сложностей запуск аппарата был перенесен на 2011 год.

Mars science lab должен стать самым продвинутым и дорогостоящим марсоходом за всю историю космонавтики.
Робот длиной в два метра существенно опережает по запасу прочности и возможностям работающие сейчас на Марсе марсоходы Spirit и Opportunity.
Новый марсоход должен определить, существовали ли когда-либо на Марсе благоприятные условия для возникновения живых микроорганизмов, а также есть ли там химические соединения, необходимые для возникновения новой жизни.
Освоение Марса – непростой процесс. И начало ему должны положить вовсе не люди, а марсоходы – полностью автономные аппараты, способные не только перемещаться по поверхности планеты, но и проводить различные исследования и передавать все полученную информацию на Землю.
Такой подход к освоению Марса люди применяют довольно давно, и сейчас благодаря марсоходам об этой планете известно очень много.
Самыми первыми были советские аппараты – Марс-2 и Марс-3, достигшие планеты в 1971 году. Однако им очень не повезло – посадка происходила в условиях сильной пылевой бури и Марс-2 27 ноября 1971 года разбился при посадке. Марсу-3 удалось приземлиться 2 декабря, и он начал передавать даже картинку, но длилось это всего 14.5 секунд, после чего связь прервалась и что там случилось, до сих пор неизвестно. Однако миссия не была полностью провалена – орбитальная станция продолжала работать почти год и присылать массу важнейших данных о планете.
Так выглядел советский аппарат Марс-3
Любопытно, что ученые в то время знали о поверхности Марса настолько мало, что было непонятно, как по ней передвигаться. Поэтому советские марсоходы были снабжены подобием лыж – на случай, если Марс покрыт песком, снегом или льдом.
Миссия Viking
Викинг-1 – первый успешно приземлившийся, или примарсившийся на Марсе аппарат. Он был запущен НАСА 20 августа 1975 года, а приземлился 20 июля 1976 года. Он передал первые удачные снимки непосредственно с поверхности планеты, и люди впервые увидели марсианские ландшафты, притом в цвете.
Миссия состояла из собственно спускаемого аппарата и спутника, который остался на марсианской орбите. Этот спутник проработал до 7 августа 1980 года, а спускаемый модуль – до 11 ноября 1982 года. В итоге при обновлении программы и перезагрузке системы была допущена ошибка и аппарат навсегда замолчал.

Викинг на Марсе
Был еще и Викинг-2, который приземлился в то же время на другой стороне планеты. Этот аппарат проработал 4 года, пока его аккумуляторы полностью не израсходовали свой ресурс.
Викинги – первый реально удачный шаг в освоении Марса, сделанный еще в 70-х — 80-х годах.
После Викингов наступило некоторое затишье в изучении и подготовке к освоению Марса. Наконец, в 1996 стартовала ракета Дельта-2 с аппаратами миссии Mars Pathfinder. В итоге на Марсе оказался марсоход Sojourner, который был подвижной частью самой станции Mars Pathfinder. Он съехал с нее и стал работать на местности, в то время как основная станция была неподвижной.
В процессе работы марсоход передал на Землю много фотографий и данные спектрометрии, что позволило лучше разобраться с химическим составом марсианского грунта. Также изучалась атмосфера и изменения температуры.
Несмотря на малые размеры – марсоход Sojourner по габаритам можно сравнить разве что с микроволновкой на колесах, он дал много ценной информации, и проработал он 3 месяца, хотя планировали максимум месяц. Выход из строя, как предполагается, произошел из-за выработанного ресурса батарей – энергия использовалась в том числе для обогрева оборудования в марсианские ночи, без чего быстро вышла из строя.
Марсоход Sojourner изучает камень
Любопытно, что в книге-бестселлере Энди Вейра «Марсианин» главный герой Марк Уотни отправляется в путешествие к Патфайндеру и забирает с собой марсоход Соджорнер, чтобы установить с его помощью связь с Землей.
Программа Mars Surveyor 98 – неожиданный провал
Эта программа НАСА стартовала 3 января 1999 года и предусматривала два режима работы. Аппарат Mars Climate Orbiter должен был изучать планету, находясь на орбите, и служить ретранслятором для передачи данных на Землю со второго аппарата. Mars Polar Lander должен был спуститься на планету. Кроме того, на спускаемом модуле имелись зонда-пенетраторы, которые на большой скорости должны были вонзиться в поверхность планеты и передать данные о составе грунта.
Добравшись до Марса 23 сентября, аппарат Mars Climate Orbiter потерпел аварию при выходе на орбиту вокруг планеты.
3 декабря второй аппарат – Mars Polar Lander, вошел в атмосферу для посадки, и больше на связь не вышел. Поиски сигнала в течении полутора месяцев, в том числе с межпланетной станции, результата не дали. По итогам этого провала в дальнейшем было решено отказаться от такого метода исследования, когда используется два аппарата в связке – спускаемый и орбитальный. Неудача одного губит всю миссию.
Причинами провала программы Mars Surveyor 98 считают спешку при её подготовке и недостаточное финансирование – оно было минимум на 30% меньше, чем требовалось.
Beagle – 2 – еще одна неудача
Посадочный модуль Бигль-2 был разработан британскими учеными, а название ему было дано в честь корабля, на котором путешествовал Чарльз Дарвин. Миссия «Марс-экспресс» стартовала в 2003 году, но завершилась полной неудачей – модуль сел на Марс, но связь с ним не состоялась.
Лишь в 2015 году, спустя 12 лет, на снимках, сделанный одним из орбитальных аппаратов НАСА, Бигль-2 был опознан и стало понятно, почему он не вышел на связь после посадки. Солнечные батареи модуля должны были раскрылись полностью, чтобы радиоантенна могла принимать команды со спутника-ретранслятора и передавать данные. Однако панели раскрылись лишь частично, загородив антенну, и аппарат не смог ничего принять или передать, превратившись в очередной памятник.
Марсоход Spirit
2004 год для НАСА был триумфальным в плане изучения Марса. Сразу несколько запущенных марсоходов успешно достигли Марса и также успешно выполнили свои задачи, а некоторые из них и сейчас работают.
Марсоход Спирит сел на планету 4 января 2004 года, и планировалась его работа в течении 90 солов, за которые ему нужно было преодолеть около 600 метров. Однако на деле марсоходу помог ветер, сдувавший пыль с солнечных батарей, благодаря чему выработка электроэнергии стала эффективнее, чем планировалось. В итоге Спирит вместо 600 метров преодолел 7.73 км и проработал до 22 марта 2010 года – более 6 лет!
В последнее время своей работы марсоход использовали как стационарную платформу, так как 1 мая 2009 года он застрял в дюне и вызволить его оттуда не смогли. Несмотря на это, марсоход оставался на связи и продолжал исследования, хотя перемещаться не мог. 22 марта 2010 года марсоход окончательно замолчал, хотя еще целый год специалисты пытались наладить с ним контакт.
Любопытно, что название «Спирит» марсоходу дала русская девочка, которая родилась в Сибири, но была удочерена американцами. Когда НАСА проводило конкурс, это название победило.

Марсоходы Sojourner (маленький), Opportunity (средний) и Curiocity (большой)
Марсоход Opportunity
Марсоход Оппортьюнити сел на поверхность Марса 25 января 2004 года, через 3 недели после Спирита, но по долготе это место было смещено на 180 градусов. Этот марсоход по конструкции практически идентичен Спириту, то есть их можно считать близнецами. В отличие от Спирита, Оппортьюнити нигде не застрял (был один случай, но его удалось освободить), и продолжает работать до сих пор, побив все рекорды по долгожительству среди всех марсоходов.
Оппортьюнити – один из наиболее совершенных марсоходов. Он снабжен мощным компьютером (по меркам 2003 года), имеет отличную конструкцию, прекрасное программное обеспечение и множество оборудования. Например, когда марсоходу приказывают двигаться к какой-либо точке, он проводит анализ местности на наличие опасных и труднопреодолимых мест, затем делает снимки двумя камерами и на основе стереоизображения определяет наиболее легкий маршрут. Этот процесс периодически повторяется, и напоминает работу обычного зрения.
Работа марсохода была рассчитана на 90 солов (92.5 земных дня), а проработал он 15 лет. Данные, переданные им, бесценны. За неоценимый вклад в науку именем этого марсохода даже назвали астероид.
Дополнение: 13 февраля 2019 года миссия Opportunity была прекращена. Марсоход с 18 июня 2018 года не выходил на связь, когда на Марсе бушевала мощная пылевая буря, охватившая всю планету. Солнечные батареи несколько недель не могли получать достаточно света для энергосети. С тех пор связь с Opportunity пропала и установить её не удалось.
Марсоход Curiosity
Именно к марсоходу Curiosity («Любопытство») сегодня приковано внимание всех неравнодушных людей. Снимки, сделанные этим аппаратом, заполонили интернет, и большое количество людей пытаются рассмотреть на них некие артефакты, из чего потом появляются сенсационные заголовки.
Марсоход Кьюриосити оказался на Марсе в августе 2012 года, и сейчас это пока самый новый и современный аппарат на этой планете. Он же и самый большой — если сравнивать его с предыдущими моделями, то этот просто гигант, на Земле весящий 900 кг, и он даже больше советского «Лунохода».
Этот марсоход представляет собой мощную автономную лабораторию. Если предыдущие модели имели небольшой набор оборудования, в основном геологического, то здесь есть практически всё – марсоход может как изучать химический состав всего, что попадется на пути, так и искать следы жизни. Кстати, такое оборудование используется впервые – оно способно изучать молекулярный состав образцов и сможет обнаружить даже обрывки органических молекул, если они попадутся.
Цель марсохода – собрать максимум информации, достаточной для планирования освоения Марса непосредственно человеком в ближайшем будущем. Поэтому он ведет всесторонние исследования с использованием большого набора научных приборов.
17 видеокамер способны вести круговую съемку в высоком качестве со скоростью 10 кадров в секунду – получается практически видеосъемка. Раз в сутки на марсоходом пролетает орбитальный аппарат и марсоход быстро передает ему огромный массив данных, накопленный за это время. Потом уже этот спутник по мощному каналу передает все на Землю.

Иногда Curiosity делает селфи, по которым изучается общее состояние марсохода. Камера расположена на выносной штанге, которая в кадр не попадает.
Питание марсохода также отличается от предыдущих моделей – на нем нет солнечных батарей, а стоит ядерный источник энергии на плутонии-238, который производит как тепло для обогрева оборудования, так и электроэнергию. Его ресурса хватит еще лет на 20-35, а то и больше. с подобной энергоустановкой работаю уже 40 лет, хотя энергия у них уже практически закончилась.
Видеозапись спуска марсохода Curiosity на поверхность Марса, ускоренная в 3 раза:
Описание миссии Curiosity заслуживает отдельной статьи, из-за огромного количества интересной информации.
На этом краткий обзор всех марсоходов, побывавших на Красной планете, закончим. Все они внесли большой вклад в изучение соседнего мира и в подготовку к освоению Марса человеком. На данный момент там работает один марсоход — Curiosity и стационарный геологический .

Вконтакте
Марсоход "Spirit" и "Opportunity"
10 июня 2003 г. в 17:58:46 UTC (13:58:47 EDT) со стартового комплекса SLC-17A станции ВВС США «Мыс Канаверал» был выполнен успешный пуск РН Delta 2 с американской автоматической межпланетной станцией MER-2, получившей собственное имя Spirit. Целью полета являлась доставка марсохода на поверхность Марса в кратер Гусев (15°ю.ш., 175°в.д.). Посадка была запланирована на 4 января 2004 г. в 04:11 UTC. Программа полета, ракета-носитель и сама станция обозначаются MER-A. 8 июля 2003 г. в 03:18:15 UTC (7 июля в 23:18:15 EDT) с соседнего стартового комплекса SLC-17B состоялся запуск РН Delta 2 с идентичной станцией MER-1, названной Opportunity. Второй марсоход прибыл к Марсу 25 января и в 04:56 UTC будет посажен в район 2°ю.ш., 5°в.д. на равнине Меридиана. Эта миссия имеет техническое обозначение MER-B.
.jpg) .jpg) |
|
|
Лобовой экран посадочного модуля MER. |
Справа
- так выглядела посадка на Марс первого марсохода Spirit. В таком коконе из надувных шаров марсоходы опускались на поверхность. |
-300x172.jpg) |
.jpg) |
|
Кратер Гусев (крупный в центре) и долина Маадим - сухое русло, по которому в прошлом текла вода. В этом районе находится марсоход Spirit. |
Структура и строение роверов NASA |
Решение об отправке на Марс в астрономическое окно 2003 г. двух марсоходов MER было принято летом 2000 г. Каждый из них - это робот-геолог, оснащенный аппаратурой для анализа состава марсианских пород в радиусе нескольких сотен метров. Общая цель миссии - выяснить историю воды на Марсе и ее роль в геологии и климате планеты. Задачи роверов
MER были сформулированы следующим образом:
- Найти и описать различные типы пород и грунта, имеющие следы воздействия воды в прошлом; - Изучить районы, выбранные по результатам съемок с орбиты, в которых предсказаны следы физического или химического воздействия воды; - Определить пространственное распределение и состав минералов, пород и грунта, окружающих место посадки; - Определить природу местных поверхностных геологических процессов по морфологии и химии поверхности; - Подтвердить результаты дистанционного зондирования с орбиты, оценить количество и масштаб неоднородностей; - Определить относительное количество разных железосодержащих минералов, которые содержат связанную воду или гидроксилы, а также железосодержащих карбонатов; - Описать минеральные ассоциации и текстуры разных типов пород и грунта в геологическом контексте; - На основе геологического исследования определить условия среды, при которых существовала жидкая вода, и оценить их пригодность для жизни.
Два района работы марсоходов были объявлены 11 апреля 2003г.: 150-километровый кратер Гусев и Земля Меридиана. В первом съемками с КА Mars Global Surveyor и Mars Odyssey 2001 выявлен рельеф, очень напоминающий высохшее озеро, а от кратера тянется речная долина Маадим длиной около 900 км. Во втором районе имеются большие залежи серого гематита - минерала, который обычно (но не всегда) формируется в присутствии жидкой воды. Выбрать две точки, ценные с научной и достижимые с технической точки зрения - такова была задача комиссии, которую возглавляли д-р Мэтт Голомбек (JPL) и д-р Джон Грант (Национальный аэрокосмический музей США) и в которой работали более 100 ученых. На первом этапе отбора на поверхности Марса были выявлены 155 или 185 (по разным сообщениям) мест, удовлетворяющих «техническим» требованиям. Место должно находиться недалеко от экватора, в низине. Уклон должен быть невелик. Камней и пыли должно быть немного. Далее в расчет бралась научная «ценность» каждой точки, и в декабре 2001г отобрали четыре из них. Уже в марте 2002г предполагалось сократить их число до двух и в мае, за год до запуска, - утвердить. Однако прошел еще почти год, пока обе точки были названы официально. Почему? Во-первых, к каждой из четырех точек-кандидатов были замечания, серьезность которых требовалось проверить дополнительной съемкой. Во-вторых, до самой весны 2003г в NASA не были уверены, успеют ли они подготовить к астрономическому окну оба ровера. Достаточно сказать, что лишь 16 января 2003 закончились испытания в аэродинамической трубе парашютной системы MER. Поэтому точки объявили тогда, когда стало совершенно ясно: «Успеваем!».
Космический аппарат MER по своей структуре напоминает русскую матрешку. Внутри - собственно ровер, шестиколесный марсоход. Следующий компонент - посадочное устройство с тремя боковыми треугольными лепестками, раскрытие которых после посадки приводит к принудительному переворачиванию в правильное положение. Чтобы ровер уместился внутри «тетраэдра», его мачта кладется набок, панели солнечных батарей складываются кверху, а передняя пара колес выворачивается причудливым образом. Снаружи на четыре грани «тетраэдра» устанавливаются по шесть надувных амортизаторов, аналогичных использованным на станции Mars Pathfinder. Весь этот «клубок» помещается на лобовой экран и прикрывается сверху хвостовым обтекателем со смонтированной на нем парашютной системой. Спускаемый аппарат собран. Осталось поместить его на перелетную ступень - и вот КА MER готов!
Все это вместе имеет массу 1077 кг, из которых 179 кг приходится на ровер, 369.5 кг - на посадочное устройство, 84 кг - на лобовой экран, 209 кг - на хвостовой обтекатель и парашютную систему и, наконец, 190.5 кг - на перелетную ступень, которая заправляется 45 кг топлива для коррекций. Перелетная ступень имеет диаметр 2.65 м при высоте 1.60 м. Она оснащена солнечными батареями. Система ориентации со звездным и солнечным датчиками обеспечивает заданный режим полета - закрутку со скоростью 2 об/мин. Двигательная установка для коррекции траектории и направления оси вращения включает два титановых бака топлива (гидразин) и два комплекта двигателей по четыре в каждом. Посадочная платформа изготовлена из композиционного материала и, помимо электроприводов боковых лепестков, имеет моторы подтягивания сдутых амортизаторов, трап для схода ровера, радиовысотомер и две антенны.
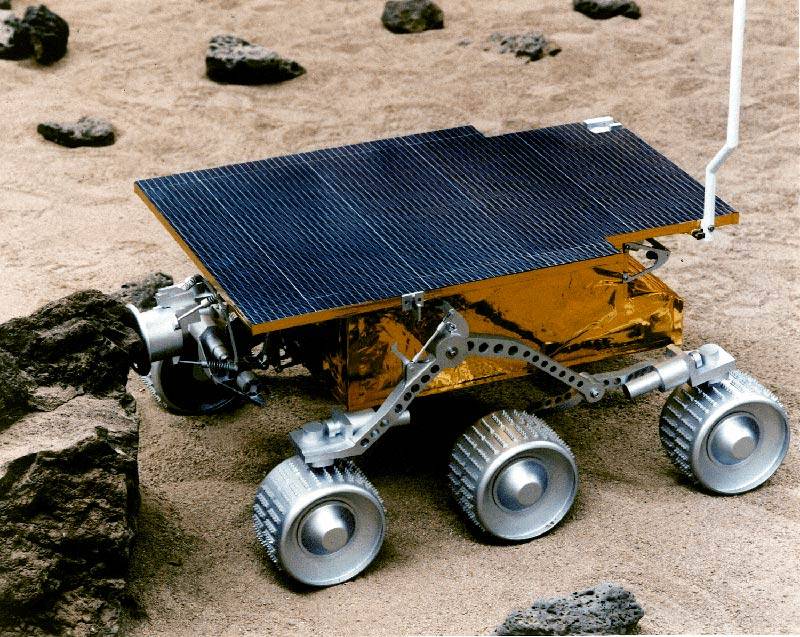
Ровер с развернутыми панелями солнечных батарей и поднятой штангой имеет длину 1.6 м, ширину 2.3 м и высоту 1.5 м. Он втрое длиннее своего знаменитого предшественника Sojourner’а и в 18 раз тяжелее. Корпус ровера изготовлен из сотового композиционного материала с теплоизоляцией из аэрогеля. Внутри его электронагревателями и восемью радиоизотопными источниками (2.7 г двуокиси плутония-238 в каждом) поддерживается температура не ниже -20°C. Здесь размещены аккумуляторные батареи, 32-битный компьютер Rad-6000 (20 млн операций в секунду, 128 Мбайт оперативной и 3 Мбайт постоянной памяти) и служебная аппаратура. На треугольной верхней плоскости установлены три антенны - остронаправленная HGA, ненаправленная LGA и антенна UHF-диапазона для ретрансляции через спутники Марса - и штанга научной аппаратуры. Остальная ее часть и две откидные створки заняты трехслойными фотоэлементами общей площадью 1.3 м 2 и суммарной мощностью 140 Вт. Пять литий-ионных аккумуляторных батарей используются во время спуска, а две из них питают ровер марсианской ночью.
Ходовая часть ровера включает шестиколесное шасси со специальной подвеской, позволяющей ему преодолевать высокие препятствия. Колеса ровера алюминиевые, диаметром 26 см. Центр масс аппарата находится очень низко, что позволяет ему не опрокидываться при наклоне до 45° в любую сторону. В бортовом компьютере, однако, запрограммировано ограничение по уклону в 30°. Независимый привод передних и задних колес позволяет роверу развернуться на месте. Бортовое навигационное ПО обеспечивает движение к заданной с Земли цели с обходом препятствий, которые «видят» две пары навигационных камер - передняя и задняя. Ожидаемая протяженность маршрута запланированная для каждого ровера - 600 м, максимальный суточный переход - до 40 м, максимальная скорость - 5 см/с, средняя - 1 см/с.
Через антенну HGA ровер может вести передачу со скоростью более 11 кбит/с. Примерно половина информации будет, однако, передана не напрямую, а через орбитальные ретрансляторы MGS, Mars Odyssey и - в порядке демонстрации совместимости - через Mars Express.
Научная аппаратура (Athena)
Панорамная камера PanCam (Panoramic Camera). Эта цветная стереокамера служит для получения панорам с разрешением 1’ на пиксел, определения характера поверхности и препятствий движению, выбора образцов для изучения, а также поиска следов, оставленных водой. Она размещается на штанге на высоте около 1.3 м над грунтом. Два объектива разнесены на 30 см, а угол между осями составляет 1°. Штанга может поворачиваться на 360° относительно вертикальной оси, а головка объективов наклоняться на угол от -90° до +90°. Камера использует ПЗС-детекторы с матрицей 1024x2048, причем одна ее «половинка» ведет накопление «картинки», а вторая используется как буфер для передачи кадра. Поле зрения камеры - 16.8x16.8° при фокусном расстоянии 38 мм и относительном отверстии 1:20, глубина резкости - от 1.5 м до бесконечности. Имеются восемь фильтров: «прозрачный» на диапазон 400-1100 нм и узкополосные. Рядом с PanCam установлена черно-белая широкоугольная навигационная стереокамера меньшего разрешения.
Термоэмиссионный спектрометр Mini-TES (Mini-Thermal Emission Spectrometer) определяет по инфракрасному излучению минеральный состав деталей окружающего рельефа (карбонаты, силикаты, органические молекулы, минералы, сформированные в воде) и позволяет выбрать образцы для детального изучения. Кроме того, определяется тепловая инерция камней и грунта. Прибор также планируется использовать для составления детального профиля температуры в пограничном слое марсианской атмосферы. Mini-TES представляет собой интерферометр Майкельсона на диапазон 5-29 мкм; угловое разрешение составляет 20 или 8 мрад (1.1 и 0.45°). Прибор размещен в корпусе ровера и использует мачту панорамной камеры как перископ. Он ограничен пределами от -50° до +30° по углу места.
Четыре инструмента для детального исследования образцов находятся на манипуляторе IDD (Instrument Deployment Device) в передней части ровера. Их работу можно наблюдать с передней пары навигационных стереокамер:
Альфа - и рентгеновский спектрометр APXS (Alpha-Particle and X-ray Spectrometer) определяет элементный состав пород и грунта (за исключением водорода). Образцы зондируются альфа-частицами и рентгеновскими лучами, испускаемыми радиоактивным изотопом кюрий-244, а энергетический спектр рассеянных альфа-частиц и вторичных рентгеновских лучей регистрируется. Имея самостоятельную ценность для определения истории коры Марса, процессов выветривания и воздействия воды, данные APXS облегчают и дополняют анализ минерального состава с помощью других инструментов.
Мёссбауэровский спектрометр (Moessbauer Spectrometer) с двумя радиоактивными источниками на кобальте-57 определяет с высокой точностью структуру ядерных уровней железа-57, что позволяет установить состав и относительное количество железосодержащих минералов. Кроме того, будут определены магнитные свойства поверхностных материалов, по которым можно судить о природных условиях в ранние эпохи существования Марса. Это очень «медленный» прибор - одно измерение требует 12 часов работы.
Камера-микроскоп (Microscope Imager) позволяет рассмотреть анализируемые другими приборами образцы пород и грунта на масштабах в сотни микрометров. При этом будут видны характерные особенности осадочных пород, образовавшихся в воде, детали, связанные с вулканической активностью и метеоритной бомбардировкой, а также, возможно, те детали в марсианских карбонатах, которые исследовательская группа Криса МакКея считает микроокаменелостями биологического происхождения. Фокусное расстояние камеры составляет 20 мм, поле зрения - 31x31 мм, матрица - 1024x1024 пиксела, разрешение - 30 мкм/пиксел, изображение панхроматическое (400-680 нм).
Чтобы очистить образцы от пыли и выветренных поверхностных слоев, используется шлифовальное устройство RAT (Rock Abrasion Tool). С его помощью с образца базальта за 2 часа можно снять до 5 мм на площадке диаметром 45 мм.
Кроме того, каждый ровер имеет три магнитные ловушки с магнитами различной силы, на которых будут оседать обладающие магнитными свойствами частицы пыли. Одна ловушка установлена на передней части ровера и доступна для анализа спектрометрами, вторая находится на верхней плоскости в поле зрения панорамной камеры, а третья - на устройстве RAT. Наконец, на корпусе ровера имеются калибровочные мишени для трех спектрометров и цветная калибровочная таблица для панорамной камеры, выполненная в форме солнечных часов.
Первый запуск: подготовка и ход полета 2003
Запуски двух станций планировались в период с 30 мая по 19 июня и с 25 июня по 15 июля 2003 г. 27 января в Космический центр имени Кеннеди были доставлены для предстартовой подготовки компоненты станции MER-2 - перелетная ступень, посадочная ступень и аэродинамический экран. 24 февраля в Корпус обслуживания опасных ПН привезли такой же комплект MER-1 плюс марсоход MER-2. Наконец, 11 марта прибыл марсоход MER-1. На космодроме сразу же были проведены функциональные испытания КА. На ровере MER-2, который шел по графику первым, 6 и 9 марта проверили развертывание створок посадочного устройства, солнечных батарей ровера, подъем мачты с камерой и сделали контрольную съемку с этой камеры. 20-23 марта аппарат прошел второй функциональный тест, и 28 марта марсоход был установлен на посадочное устройство.
Ровер MER-1 проверили 21 марта на маневрирование среди препятствий, имитирующих поверхность Марса. 31 марта был проведен тест развертывания солнечных батарей и камеры, 2 апреля - развертывание и проверка штанги научной аппаратуры, 4 апреля - второй функциональный тест. В это время была обнаружена серьезная проблема. В полете ровер с его компьютером и аппаратура на посадочной платформе и перелетной ступени соединены кабелями, которые перерезаются перед разделением соответствующих компонентов. При испытаниях «вдруг» выяснилось, что аппарат может неправильно отреагировать на сбойные «сигналы», формирующиеся в момент перерезания кабелей. Кабельная сеть на обоих аппаратах потребовала доработки, из-за которой старт первого аппарата отложили до 5 июня.
В конце апреля был полностью собран посадочный комплекс MER-2: посадочная ступень и на ней ровер, защищенные экраном, а 7 мая он был состыкован с перелетной ступенью. 11 мая аппарат был заправлен и 23 мая собран в головной блок вместе с третьей, твердотопливной ступенью ракеты. Сборка ракеты на стартовом комплексе SLC-17A началась с установки 1-й ступени 23 апреля и 2-й ступени 28 апреля. После испытаний 1-й ступени на нее навесили девять стартовых ускорителей - 13, 14 и 15 мая по три штуки. Утром 27 мая головной блок привезли на старт и установили на ракету, а 31 мая закрыли головным обтекателем. 28 мая запуск был отложен на 3 дня, до 8 июня. Выбранные названия КА, как и имя победителя конкурса, были торжественно объявлены в прямом телевизионном репортаже из Космического центра имени Кеннеди на мысе Канаверал 8 июня 2003 года. Руководитель NASA и маленькая светловолосая девочка убрали кусок ткани, прикрывавший стенд, и все увидели два слова из разноцветных букв - Spirit и Opportunity-«Дух» и «Возможность». Девятилетняя ученица третьего класса из аризонского города Скоттсдейл Софи Коллис, ставшая победительницей конкурса, предложила эти слова, вспоминая свою детскую мечту о полете к звездам. «Звездный дух» зародился у нее, когда она еще жила в детдоме в Сибири. Удочеренная несколько лет назад американской семьей. 8 июня было два «мгновенных» стартовых окна - в 14:05:55 и 14:44:07 EDT. Запуск не удалось выполнить из-за плохой погоды - сильный ветер, гроза. Та же история повторилась и 9 июня, и лишь 10 июня в первое из двух «окон» Delta 2 стартовала. Через 9 мин 39 сек вторая ступень вышла на опорную орбиту высотой около 170 км. После 15-минутной баллистической паузы в T+26 мин 29 сек прошло второе включение ДУ 2-й ступени с подъемом орбиты до 163x4762 км. На этой орбите отделился головной блок, и в T+30 мин 30 сек прошло включение РДТТ Star-48B. Наконец, в T+36 мин 40 сек прошло отделение КА. Сигнал от него принят через 51 мин.
3 января 2004 высоко в небе Марса промелькнул огненный след, напоминающий метеор. Там, где он погас, появилась светлая точка, плавно перемещавшаяся по небу и постепенно увеличивающаяся в размере. Затем под парашютом стал раздуваться белый кокон, напоминающий комок гигантских слипшихся шариков для пингпонга, состоящий из 24 выпуклых полусфер. В непосредственной близости от поверхности Марса парашют, отброшенный направленным взрывом пиропатронов, отскочил в сторону, вспыхнули и погасли тормозные двигатели и с высоты 10-15 м кокон упал на планету, подпрыгнул на несколько метров, еще раз упал, снова подпрыгнул - и так пять раз. Каждый прыжок становился все ниже и ниже, пока странный предмет не замер неподвижно, теряя свою форму, и наконец совсем обмяк - как будто из надувной игрушки выпустили воздух. Когда сдувшаяся оболочка опала на грунт, то обнаружилось, что внутри нее находится металлическая платформа, на которой расположена сложной формы конструкция с шестью колесами - марсоход Спирит. 20 дней спустя вся эта картина повторилась с точностью до мельчайших деталей, но уже совсем в другом районе Марса - на противоположной стороне планеты. Так началась марсианская одиссея двух роботов-вездеходов, чтобы искать ответ на давний вопрос: «Есть ли жизнь на Марсе?»
Строение марсоходов и их инструменты
Вездеходы Mars Exploration
попытаются определить историю геологии и климата мест Марса, которые, как считают ученые, были благоприятными для формирования жизни. Каждый вездеход оснащен блоком инструментов, которые будут использоваться для исследований.
Для миссии Mars Exploration существуют следующие приоритеты в исследованиях:
1)
Поиск разнообразных скал и почв, содержащих информацию о деятельности воды (минералы, осадки, испарение, гидротермальная деятельность)
2)
Определение содержания минералов в пространстве на месте посадки.
3)
Определение геологических процессов, происходивших на Марсе.
4)
Уточнение и подтверждение данных дистанционного зондирования в местах посадки.
Для выполнения научных задач вездеходы обладают следующими приборами:
Инструменты, предназначенные для осмотра:
1)
Панорамная камера
с высоким разрешением будет делать стерео изображения. Она дополняет камеры навигации вездехода. Панорамы с Марса будут с очень высоким разрешением. Угловое разрешение камеры в 3 раза выше, чем на камерах Mars Pathfinder. Снимки камер помогут ученым определить, какие скалы подвергать исследованию другими приборами, а также они помогут заметить следы водной эрозии, если такие существуют.
2)
Мини-температурный спектрометр
, видит инфракрасное излучение, выдаваемое объектами. Прибор может определить издалека минеральную композицию марсианской поверхности. Он поможет выбрать специфические почву и камни для подробных исследований. Наблюдение в инфракрасном диапазоне позволяет видеть сквозь пыль, которая покрывает скалы. Прибор может определить наличие карбонатов, силикатов, органических молекул и минералов, формировавшихся в присутствии воды. Инфракрасные данные также помогут ученым определить возможность удерживать тепло скалами и почвой. Кроме изучения скал, прибор может изучить инфракрасное излучение атмосферы. Эти данные дополнят материалы, полученные термическим спектрометром Mars Global orbiter, находящийся сейчас на орбите, около Марса.
Инструменты в рычаге (смотрите рисунок):
1)
Прибор Microscopic
- комбинация микроскопа и камеры (предел видимости прибора около ста микрон). Блок формирования изображения поможет определить осадочные скалы, которые формировались в воде, и таким образом поможет ученым смоделировать прошлую водную среду Марса. Этот инструмент также даст информацию о скалах, сформировавшихся под действием вулканического влияния.
2)
Поскольку многие наиболее важные минералы содержат железо, на аппарате установлен спектрометр Mossbauer предназначенный для определения с высокой точностью содержания железа. Идентификация железа в минералах даст информацию о ранних марсианских условиях. Спектрометр также способен изучать магнитные свойства поверхностных материалов и определяющих минералов, формированных в горячих, водянистых средах, которые могли бы сохранить ископаемое подтверждение марсианской жизни. Энергетическая установка прибора - два радиоактивных источника, содержащих cobalt-57, каждый из них размером с обычный карандашный ластик.
3)
Рентгеновский спектрометр
альфа частиц точно определяет элементы, из которых состоят скалы и почва. Эта информация поможет дополнить анализ минералов, осуществленный другими приборами.
4)
На рычаге аппарата установлен также прибор для очищения скал. Прибор подвергает расчистки область диаметром 4,5 см в диаметре и 5мм в глубину.
Кроме того, на аппаратах установлены сборщики пыли, находящейся в воздухе. Пыль будет подвергаться исследованиям рентгеновским спектрометром. Устройства эти изготовлены в Дании.
В январе 2005 года по предложению нидерландского астронома, открывшего два новых астероида, Международный астрономический союз присвоил им названия Spirit и Opportunity, отметив тем самым годовщину успешной работы марсоходов на поверхности Марса. Это стало первым случаем, когда астероиды назвали в честь космических станций. До сих пор для этого использовали имена мифологических персонажей, фамилии людей и названия городов. Теперь по своим орбитам, пролегающим между Марсом и Юпитером, движутся каменные тезки марсоходов - небольшие астероиды Spirit и Opportunity. Диаметр первого равен 5 км, а второго - 7. Они совершают один оборот вокруг Солнца за 8 лет.